Voici comment flou de l'objectif des travaux de l'effet de la caméra Google

Effets de profondeur de champ réglable sont les nouvelles fonctionnalités de l'appareil photo chaude inclus à la fois dans la nouvelle Samsung Galaxy S5 et HTC One M8. Si vous ne croyez pas l'achat d'un nouveau combiné, la nouvelle version Google App Caméra comprend une fonction similaire ainsi. La profondeur de champ est idéal pour ajouter un peu de "pop" supplémentaire pour vos images, apportant caméras de smartphones une caractéristique de plus près à leurs cousins de SLR.
Pour un peu de fond, Flou de l'objectif de Google vous permet de changer le point ou le niveau de mise au point d'une image, même après la photo a été prise, d'une manière similaire à Samsung Mise au point sélective dans le mode de GS5. En tapant sur une partie de l'image permet de régler le point focal, tandis qu'un curseur est utilisé pour ajuster l'intensité de l'effet en temps réel. Si vous souhaitez savoir comment le logiciel de Google basé fonctionnement de l'effet flou de l'objectif, alors lisez la suite.
Comme l'application est utilisée sur les appareils qui ne disposent que d'une seule caméra, la première étape consiste à capturer plusieurs images de très légèrement différentes positions de base pour commencer à recueillir des informations sur la profondeur. Au lieu de capturer une seule photo, vous déplacez la caméra dans un balayage vers le haut pour capturer toute une série de cadres. A partir de ces images, le logiciel crée un modèle virtuel en 3D de la scène par des traverses références pixels de la série d'image.
Modèles 3D peuvent être créés à partir d'images capturées à partir de plusieurs positions. Bien avec les smartphones, l'angle de capture limitée se traduira par un modèle beaucoup plus fondamentale. Source: JVRB Nghiago
Ceci est où les choses exiger un peu de ruse, que le logiciel doit être capable d'identifier des caractéristiques similaires sur plusieurs images avant de pouvoir construire le modèle. Ceci est accompli par le suivi des points spécifiques connus sous le nom d'algorithmes de structure-Motion (SFM) et ajustement faisceau.
Positionnement de Pixel peut être suivi entre le modèle et initiales des images 3D nouvellement créées, afin de suivre les distances et la visibilité entre les parties de la scène. Source: UNC
De ce modèle de la profondeur 3D, Google utilise des algorithmes Multi-View-stéréo pour calculer les distances approximatives entre les points de la scène, qui est utilisé pour former une carte de profondeur. Points de références sont figurées partir de la somme des différences absolues (SAD) des valeurs RVB des pixels de l'image. En d'autres termes, les différences de couleur entre un groupe de pixels crée un identifiant unique qui peut être trouvé maintes et maintes fois dans différentes images pour un point de référence. Pour accélérer et optimiser le processus, des points de référence sont prises à partir de différentes parties des images, comme des pixels proches les uns sont très susceptibles d'avoir des profondeurs très similaires.
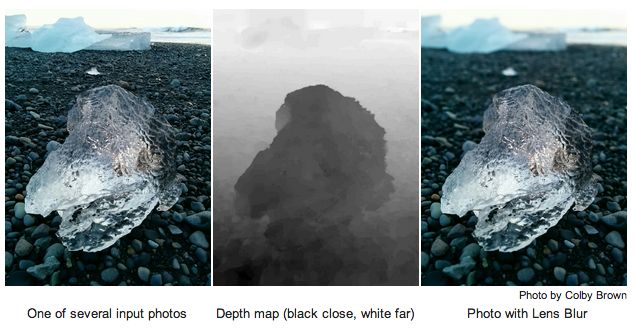
En fin de compte, cela fonctionne d'une manière très similaire à l'œil humain, où nous pouvons travailler sur la distance d'un objet en l'affichant à partir de deux angles légèrement différents. L'image ci-dessous montre un exemple d'information de profondeur finalisé calculé par l'application.
Ayant calculé la carte de profondeur, il est alors juste un cas de flou pixels de profondeur similaire à donner le point focal désiré. Comme plusieurs points de référence sont maintenant stockés pour l'image, les informations de distance peut être rappelé si l'utilisateur veut régler le point ou le niveau de flou focal.
Il ya beaucoup de maths et de codage derrière tout cela, mais les résultats parlent vraiment pour eux-mêmes.
-
 s 'double caméra. Que voulez-vous construire?") HTC donne aux développeurs tiers de contrôle de l'Un (M8) s 'double caméra. Que voulez-vous construire?
HTC donne aux développeurs tiers de contrôle de l'Un (M8) s 'double caméra. Que voulez-vous construire? -
![[APK Teardown] v2.5 Camera prépare une nouvelle entité "Rafale intelligent» qui sélectionne automatiquement les meilleures photos qu'il a prises](https://androidfran.ru/uploads/blockpro/65x50/2015-11/65x50_crop_[apk-teardown-google-search-v4-1-hints-at_1.jpg "[APK Teardown] v2.5 Camera prépare une nouvelle entité \"Rafale intelligent» qui sélectionne automatiquement les meilleures photos qu'il a prises") [APK Teardown] v2.5 Camera prépare une nouvelle entité "Rafale intelligent» qui sélectionne automatiquement les meilleures photos qu'il a prises
[APK Teardown] v2.5 Camera prépare une nouvelle entité "Rafale intelligent» qui sélectionne automatiquement les meilleures photos qu'il a prises -
 Google examen de l'appareil photo
Google examen de l'appareil photo -
 Flou de l'objectif Live Wallpaper - Indie application de la journée
Flou de l'objectif Live Wallpaper - Indie application de la journée -
 Caméra Google a mis à jour: le recadrage amélioré, minuterie ajoutée et plus d'options de panorama
Caméra Google a mis à jour: le recadrage amélioré, minuterie ajoutée et plus d'options de panorama -
 Des actions de Google App caméra arrive à Google Play, saisir l'APK maintenant!
Des actions de Google App caméra arrive à Google Play, saisir l'APK maintenant!
ShutterStock Je suis sûr que nous avons tous été témoins de ces réflexions embêtants tout en essayant d'attraper une photographie à travers une fenêtre, mais ces jours peut-être bientôt derrière nous, grâce à la recherche menée par…
HTC est l'envoi des invitations à un événement qu'ils appellent Double Exposure qui est fixé pour le 8 Octobre. L'invitation propose aucune indication de ce que nous devons nous attendre à l'événement, quelque chose se rapportant à sauver la…
L'appareil de la LG G2 c'est un autre caractéristique du téléphone que la société a en outre souligné lors de l'événement basé à New York. En examinant strictement matériel, nous avons un appareil photo principal de 13 mégapixels avec…
Nouveau et passionnant Moto X de Motorola vient d'être officiellement dévoilé, et maintenant il est temps pour tout le monde, même avec un intérêt à distance dans la technologie mobile à pores sur la fiche technique et de la liste des…
Nouveau et passionnant Moto X de Motorola vient d'être officiellement dévoilé, et maintenant il est temps pour tout le monde, même avec un intérêt à distance dans la technologie mobile à pores sur la fiche technique et de la liste des…
Fleurons Samsung ont toujours été parmi les quelques-uns quand il vient aux meilleures listes de caméra du smartphone, et Samsung continue de repousser les limites avec leurs dernières offres. Nous avons déjà donné les derniers fleurons de…
Plus tôt aujourd'hui Samsung a tenu une conférence de presse en Russie, où la société a annoncé son nouveau Galaxy Tab A, une nouvelle tablette milieu de gamme avec un écran 4: 3. Le Galaxy Tab Une série se décline en deux versions, l'une…
Samsung a annoncé aujourd'hui Isocell, un nouveau type de capteur de la caméra qui devrait, en théorie, donner des images qui sont plus claires et plus précise des couleurs. Un problème avec les capteurs de caméra modernes est la taille en…
Au Japon, plus tôt aujourd'hui, Sony annoncé son dernier capteur de la caméra conçue pour les smartphones - l'Exmor RS IMX230. Le capteur marque la première fois que Sony, ou toute autre société de capteur d'image mobile, a inclus le plan…
L'un des appareils Android phares remarquables lancés cette saison est le Sony Xperia Z2. Dans notre étude, nous avons trouvé le Xperia Z2 soit un changement pas si révolutionnaire du modèle précédent, compte tenu du cycle de mise à jour de…
Photographie aficionados ont probablement entendu tout cela avant, caractéristiques et la qualité DSLR-comme dans un facteur de forme compact. Jusqu'à présent, les nombreuses promesses ont échoué à livrer. Cependant, la lumière croit qu'il a…
Comme les smartphones deviennent plus mature, il devient plus difficile d'innover vraiment. Lenovo essaie tout au moins quelque chose de nouveau avec le nouveau VIBE S1. Il n'a pas un, mais deux caméras de face. Pourquoi voudriez-vous cela? Je ne…
MWC 2014 de couverture présenté par: Bitdefender Mobile Security Antivirus pour Android.Une des pièces les plus impressionnantes à la recherche de matériel trouvé dans la nouvelle Samsung Galaxy S5 est certainement la caméra. Ainsi que…
Il n'a pas été le secret le mieux gardé, mais nous sommes toujours heureux de voir enfin officiel. Aujourd'hui à New York, HTC introduit The All New One, son meilleur espoir pour un retour en 2014, après une année de perdre la faveur des…
Le nouvellement annoncée LG G3 est un riche en fonctionnalités combiné phare, offrant une gamme de technologies de pointe qui donnent d'autres fleurons une course pour leur argent. Bien que l'affichage QHD pourrait être la fable de la ville, il…